软启动参数说明
8.1起动方式
智能交流电动机软起动器共有以下6种起动方式,用户可根据自己的负载情况进行选择。
0:限流起动
1:电压斜坡起动
2:突跳限流起动
3:突跳电压斜坡起动
4:点动起动
5:摆动起动
除了点动起动外,所有起动模式都受B10.起动超时时间限制,当起动时间超过起动超时时间限制值时软起动器报告起动超时故障并停机,当 B10设置为0时,表示关闭起动超时保户。
8.1.1限流起动
起动后,电机电流快速升至所设定的电流限流值Im,并保持输出电流不大于该值,使电动机逐渐加速,电压逐渐升高,当电动机接近额定转速时,电机电流迅速下降至额定电流le,完成起动过程,如图8-1。
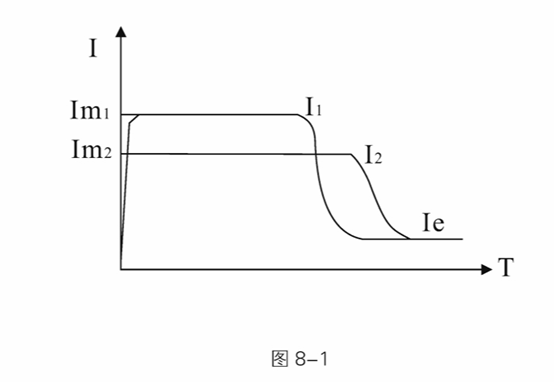
限流起动方式一般用在对起动电流有严格要求的场合,特别是电网容量偏小,要限制起动容量时,可根据要求设定限流倍数,一般在2.5~3倍之间,设定过小也会造成不能正常起动。采用限流起动时,起动时间和限流倍数大小有关,限流倍数越大,起动时间越短,反之则越长。
和“电流限流起动”相关的参数:
A01.起动方式,A02.起动限流百分比
8.1.2电压斜坡起动
起动后,软起动器输出电压,快速升至“起始电压”值U1,然后根据“电压斜坡起动时间”逐步增加输出电压,直至起动完成,如图8-2。
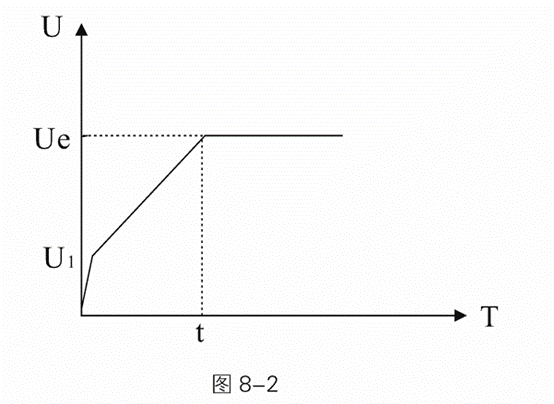
电压斜坡起动方式适用于大惯性负载,或对起动电流要求不严,而对起动平稳性要求较高的场合。这种起动方式,可大大降低起动冲击及机械应力。初始电压U1值越大,起动初始转矩越大,但起动瞬间冲击也越大。电压斜坡起动也受限流起动倍数控制,即在电压斜坡起动过程中起动电流也不会超过起动限流值,该措施是为了防止参数设置不当导致对系统的损坏,所以在使用电压斜坡模式时应适当提高起动限流值。起动过程的长短和起动时间设定值及负载的轻重有关。
和“电压斜坡起动”相关的参数:
A01.起动方式,A03.起始电压百分比,A04.电压斜坡起动时间,A02.起动限流百分比
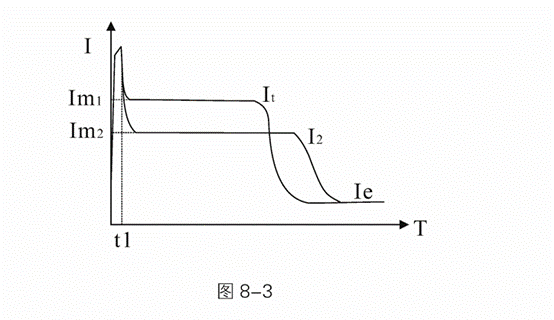
8.1.3突跳限流起动
对某些静态阻力较大的负载,在起动瞬间需要一个较大的力矩,也能正常起动,可选择这种起动模式。起动时,软起动器瞬间输出一个较高的电压(时间可设置),使电机转动,然后再按电流限流起动方式起动,直至起动完成,如图8-3。
 和“突跳电压斜坡起动”相关的参数:
和“突跳电压斜坡起动”相关的参数:
A01.起动方式,A02.起动限流百分比,A05.突跳电压,A06.突跳时间
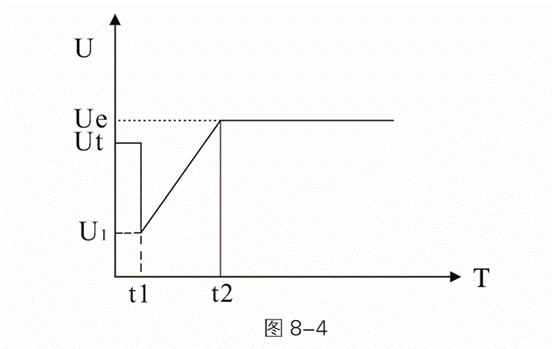
8.1.4突跳电压斜坡起动
对某些静态阻力较大的负载,在起动瞬间需要一个较大的力矩,也能正常起动,可选择这种起动模式。起动时,软起动器瞬间输出一个较高的电压(时间可设置),使电机转动,然后再按电压斜坡起动方式起动,直至起动完成,如图8-4。
 和“突跳电压斜坡起动”相关的参数:
和“突跳电压斜坡起动”相关的参数:
A01.起动方式,A03.起始电压百分比,A04.电压斜坡起动时间, A02.起动限流百分比,A05.突跳电压,A06.突跳时间
8.1.5点动起动
点动功能主要应用于某些负载定位或者试车功能。该模式可分为降压模式点动与降频模式点动,其中降频模式点动包含三种频率的降频正转与三种模式的降频反转。在降频正转模式中降频正转1速度最快,降频正转 3速度最慢;在降频反转模式中,降频反转1速度最快,降频反转3速度最慢。
在降压点动时,软起动器的输出电压迅速增加至点动电压Up(A08)并保持不变,改变点动电压Up的设定值,可改变电动机点动时的输出转矩。
在降频点动模式时,电动机的输出转矩可有A09低频点动力度调节,该数值越大则输出转矩越大,输出电流也越大。
点动时间受B11.点动超时时间限制,当点动时间超过点动超时时间值时,软起动器报告点动超时故障并停机,将参数B11调整为0表示关闭点动超时保护。
8.1.6摆动起动
针对于球磨机等大惯性且重心偏心负载起动较为困难的问题,本系列软起动器提供摆动起动功能,通过来回摇摆几次的方式可以使负载顺利起动。
摆动起动采用的基本起动模式为限流模式,其起动次数可以设置范围为1~4次,每次都可以独立设置起动时间和停止时间。软起动器会以实际起动完成为准,而不会死板的依照设置的摆动次数起动,例如设置的使4 次摆动起动而实际上仅需要2次摆动就可以起动完成,则软起动器起动两次后就会进入运行状态而不会再次执行后面剩余的摆动次数。摆动起动模式如图8-5所示。
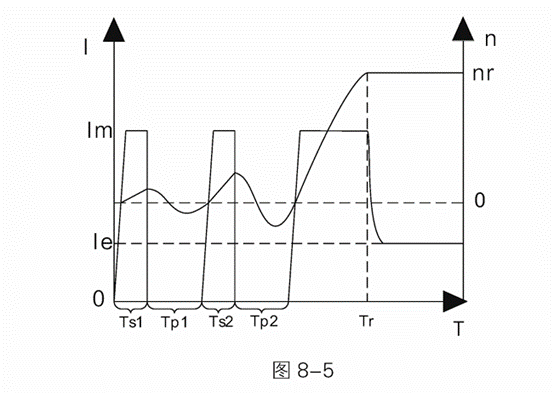 图中:1表示电动机电流,le表示电动机额定电流,Im表示起动限流值, n表示电动机转速,nr表示电动机额定转速,T表示起动时间,Ts1,Ts2表示第一次,第二次摆动起动时间, Tp1,Tp2表示第一次,第二次摆动停止时间, Tr表示起动完成时间,该图为摆动次数设置为2次的示例。
图中:1表示电动机电流,le表示电动机额定电流,Im表示起动限流值, n表示电动机转速,nr表示电动机额定转速,T表示起动时间,Ts1,Ts2表示第一次,第二次摆动起动时间, Tp1,Tp2表示第一次,第二次摆动停止时间, Tr表示起动完成时间,该图为摆动次数设置为2次的示例。
与摆动起动相关的参数如下: A01.起动方式,A02.起动限流百分比,C11.摆动次数, C12~C19.摆动起动时间及摆动停止时间
8.2停止模式
软起动器有以下三种停止模式,分别为:
- 0:自由停车
- 1:软停车
- 2:直流制动停车
8.2.1自由停车
当接到停机指令后,软起动器控制旁路接触器断开,同时,封锁主电路晶闸管的输出电压、电动机依惯性逐渐停机。
8.2.2软停车
在这种停机模式下,电动机供电由旁路接触器切换到主电路晶闸管,控制输出电压逐渐降低,直至电机平稳停机。该模式一般用于防止垂直供水管道的设备在水平停止瞬间发生的水锤现象,延长管道阀门使用寿命。
与软停车相关的参数有:
A10.停止模式,A11.软停时间
8.2.3直流制动停车
在这种停机模式下,电动机供电由旁路接触器切换到主电路晶闸管,软起动器控制输出直流电压用于电机制动停机,缩短电动机由旋转状态到达静止状态的运转时间。该模式一般用于对电动机停车时间有要求的场合,可使大惯性负载在较短的时间内完全停止到静止状态。
C04.直流制动力度用于控制直流制动转矩的大小,该参数数值越大,则制动力矩和制动电流越大,制动时间越短。C05.直流制动时间用于调整施加制动电流的时间,时间越长则制动后电机剩余的转速也就越低。
与直流制动停车相关的参数有:
A10.停止模式,C04.直流制动力度,C05.直流制动时间
8.3软起动器类型选择
参数A12.软起动器类型用于选择软起动器类型,可以在在线型与旁路型之间选择。在线型软起动器在运行状态下晶闸管保存触发状态,用于软起动器的在线工作。而旁路型(包括内置旁路与外置旁路)在运行状态时晶闸管停止触发,由旁路接触器负责接通主回路时电动机全压运行。
8.4过载保护
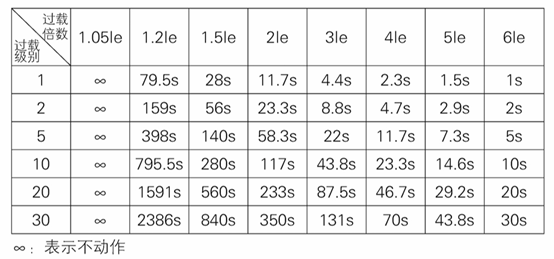
过载保护采用反时限控制
保护时间:t=$\frac{35*Tp}{(I/Ip)²-1}$
其中:t表示动作时间,Tp表示保护等级,I表示运行电流,Ip表示电动机额定电流
电动机过载保护特性曲线
电动机过载保护特性曲线:图8-6
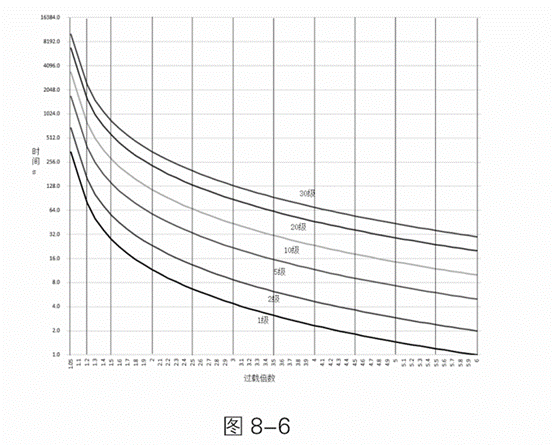
电动机过载保护特性
8.5电流到达功能
电流到达功能配合两个多功能继电器使用,分为电流大于到达值动作与电流小于到达值动作两种模式。
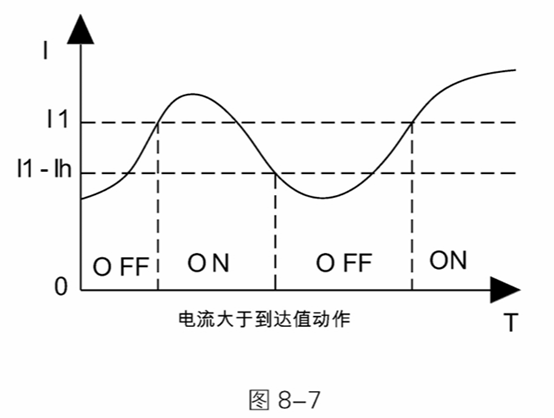
在电流大于到达值动作模式中,当运行电流大于电流到达设定值时继电器动作,当运行电流小于(电流到达值-电流到达回差值)时继电器恢复,如图8-7所示。
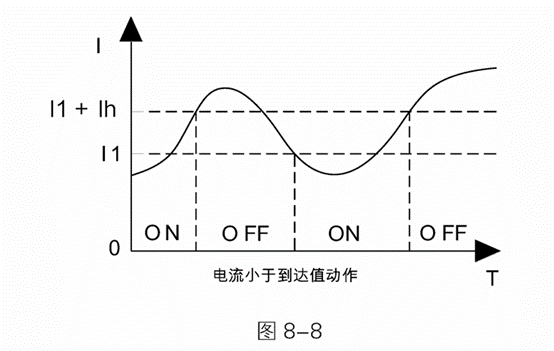
 在电流小于到达值动作模式中,当运行电流小于电流到达设定值时继电器动作,当运行电流大于(电流到达值+电流到达回差值)时继电器恢复,如图8-8所示。
在电流小于到达值动作模式中,当运行电流小于电流到达设定值时继电器动作,当运行电流大于(电流到达值+电流到达回差值)时继电器恢复,如图8-8所示。
 与电流到达功能相关的参数有:
与电流到达功能相关的参数有:
C00.可编程继电器1,C01.可编程输出延时1,C02.可编程继电器2,C03.可编程输出延时2,C06.电流到达1,C07.电流到达回差1, C08.电流到达2,C09.电流到达回差2
图中:11表示电流到达值,Ih表示回差电流,ON表示继电器动作,OFF表示继电器恢复。
8.6驱动方式
参数C10.驱动方式用于选择软起动器的驱动方式,可选择0转矩模式与1平滑模式。其中转矩模式电动机起动转矩较大,但起动过程中也可能会存在较大的电流波动,主要应用于起动困难,需要大起动转矩的场合;而平滑模式电动机起动电流平稳,控制更为精准,起动过程对机械负载与电网冲击都更小,适用于大部分场合使用。
8.7模拟电流输出功能
模拟电流输出功能可实现模拟4-20mA,0-20mA等电流输出功能。
C28.4-20mA上限电流:用于设定模拟电流输出上限对应的软起动器电流。
C27.4-20mA上限校准:用于设定模拟电流输出上限值,100%表示 20mA。
C26.4-20mA下限校准:用于设定模拟电流输出上限值,20%表示 4mA。
模拟电流输出参数设置举例:
例1、20mA对应2倍电动机额定电流,4mA对应0A
C28=200%,C26=20%,C27=100%
例2、20mA对应1倍电动机额定电流,0mA对应0A
C28=100%,C26=0%,C27=100%
注:如果模拟电流输出有偏差也可以使用参数C26与C27进行微调。
8.8屏幕保护时间
屏幕保护时间用于设置屏幕背光点亮时间,在最后一次操作键盘后经过E03.屏幕保护时间后,屏幕背光关闭用于节能和延长屏幕背光使用寿命。将E03.屏幕保护时间设置为0可以关闭该功能,屏幕始终保存点亮状态。
8.9屏幕对比度
如果屏幕显示过淡或过浓可使用参数E05.屏幕对比度调整屏幕对比度。
8.10通讯功能
软起动器可内置ModbusRTU通讯功能(订货时需说明),通讯协议请见通讯手册。